
SACSO en test en SV4
(grand format)
SACSO en test en SV4
(grand format)
Sacso est un Projet de Recherches Fédérateur (PRF) de l'Onera, proposé par Claude Reboulet en 1999 et dirigé par Michel Llibre à partir de 2000. Ce projet s'est appuyé sur les compétences des aérodynamiciens, des automaticiens et des fabricants de maquette de l'Onera pour concevoir et réaliser un nouveau type de Suspension ACtive pour essais en SOufflerie (SACSO).
Cette suspension a pour objet de permettre une meilleure modélisation de la mécanique du vol des aéronefs au moyen d'essais beaucoup plus riches que ceux qui sont actuellement réalisés en soufflerie. En particulier la commande en effort des six degrés de liberté de la suspension permet de simuler le vol libre de la maquette. Toutefois cette page ne présente que des travaux qui sont actuellement achevés et qui concernent essentiellement l'aspect robotique du projet. Les aspects nouveau moyen d'essais en soufflerie sont en cours d'expérimentation.
La suspension est un robot parallèle redondant à câbles (voir figures 5 et 6). La maquette est tenue par une poutre support en fibre de carbone, par l'intermédiaire d'une balance à 6 composantes (figure 1). La poutre est reliée au bâti de la soufflerie par 9 câbles motorisés à tensions asservies. Une informatique de commande permet de commander des tensions coordonnées. Dans le cas du vol libre, la conduite de ces tensions est telle que la résultante des efforts exercés par le dard sur la maquette simule la poussée des réacteurs.
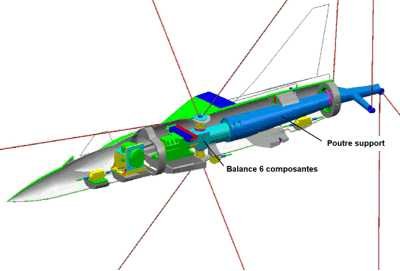
Figure 1 : maquette et suspension interne
La maquette comporte trois gouvernes opérationnelles dont la commande dépend des essais programmés.
La localisation de la maquette est assurée par l'hybridation des mesures provenant des 3 gyromètres et 7 accéléromètres embarqués sur la maquette, des mesures des longueurs des 9 câbles de la suspension et du traitement des images prises par 2 caméras de localisation.
La mesure des efforts aérodynamiques subis par la maquette résulte d'un traitement numérique qui fusionne toutes les mesures effectuées :
Ce système permet de réaliser à moindre coûts, comparativement au vol réel, des essais complexes de type vol libre. De nouvelles méthodologies d'essais en cours de définition étudient la synthèse de sollicitations de gouvernes particulièrement sensibilisantes pour identifier les coefficients aérodynamiques difficiles d'accès.
Ce petit historique des études préliminaires, limité à la première année du PRF (2001), permet de citer la première équipe d'ingénieurs qui a contribué à la conception de Sacso. Ces études préliminaires ont porté sur :
Pour l'étude de l'effet des câbles sur les écoulements aérodynamiques, plusieurs séries d'essais (figures 2 et 3) ont été effectués dans la soufflerie L1 du centre Onera de Lille. Ces essais ont permis de vérifier que les effets de la présence des câbles sur l'aérodynamique d'une maquette de mirage 2000 étaient compatibles avec les objectifs poursuivis.


Figures 2 et 3 : évaluation des effets des câbles
en
soufflerie
Les études théoriques menées ont montré la faisabilité d'une commande coordonnée de cette suspension pour simuler le vol libre. Cette commande passe par l'intermédiaire d'un torseur d'effort désiré qui est généré au moyen des câbles. Ce torseur d'effort permet de simuler l'effet de la propulsion, de modifier la direction ou l'amplitude de la pesanteur et de modifier la masse ou l'inertie de la maquette par la génération des forces inertielles correspondantes. Nos études ont montré que le point dur ne résidait pas dans la coordination de cet ensemble redondant (problème d'algorithmique numérique bien maîtrisé), mais dans l'obtention d'une bande passante élevée pour les asservissements de tension de câbles, ce qui a nécessité une modélisation fine de certains phénomènes non-linéaires (hystérésis dans les frottements des câbles sur les poulies par exemple).
Les études de conception de la structure mécanique ont donné lieu à plusieurs publications ([1], [2] et [3]) et à la thèse de docteur ingénieur de P. Lafourcade [4]. Elles ont permis de définir plusieurs architectures, dont :
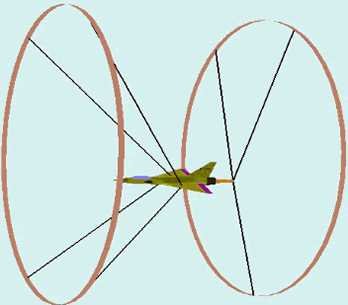
Figure 4 : architecture à 7 câbles
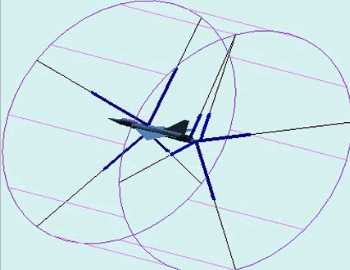
Figure 5 : architecture à 9 câbles
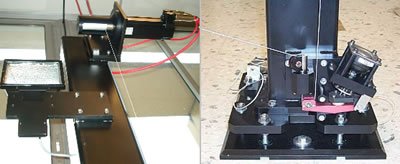
Plusieurs bancs de test (figures 6 et 7) ont été réalisés pour tester la commande en tension des câbles. Les performances désirées en bande passante (environ 35 Hz), ont été atteintes après la modélisation et l'identification des phénomènes non-linéaires liés aux frottements des câbles sur les poulies.

Figures 6 et 7 : bancs de test des asservissements en tension
de câbles
Les algorithmes qui permettent la conduite de cette architecture redondante sont issus de notre expérience en commande de robots. C'est une structure de commande coordonnée hybride position-force. Elle permet le choix entre plusieurs types de commande :
Ces divers modes de commande aboutissent tous à un torseur d'effort désiré que doivent réaliser les câbles. Le calcul des tensions des 9 câbles, contraintes en valeur minimale (20 newtons) et maximale (100 à 200 newtons selon les câbles) pour réaliser ce torseur d'effort est effectué par un algorithme de programmation quadratique spécifique que nous avons développé.
Les boucles de commande coordonnées cartésiennes en position et/ou en force et les boucles d'asservissement des tensions des câbles sont synchrones et activées avec la même fréquence d'échantillonnage de 2000 Hz.
Pour la mise au point de la commande, nous avons utilisé un sabot (figure 8) instrumenté des capteurs (gyros et accéléros) et de l'électronique embarquée. Le dard en fibre de carbone auxquels sont attachés les 9 câbles est relié au sabot par l'intermédiaire d'une fausse balance de même masse et raideur que la balance utilisée avec la vraie maquette (figure 9). Ces maquettes ont été réalisées à Lille par le département "Études et réalisation de maquettes" (M. Deschamps).


Figures 8 et 9 : le sabot instrumenté et la maquette
définitive
Les plans de la partie mécanique ont été dessinés par A. Dillinger (Centre de Toulouse). La mécanique a été en partie sous-traitée et en partie réalisée par A. Dejean et B. Fasano(Centre de Toulouse).
La structure porteuse externe est constituée de 8 poteaux en mécano soudé supportant les 9 moteurs de commande de tension des câbles. Ceux-ci sont enroulés sur un tambour (figure 10), passent par des poulies de renvoi instrumentées d'un système amortisseur et d'un système de mesure de la tension (figure 11).
Figures 10 et 11 : moteur, tambour, poulies de renvoi, amortisseur et
mesure de tension
La maquette est fixée dans sa position de référence par un bras de positionnement initial (figure 12). La figure 13 montre le sabot suspendu par les 9 câbles dans le laboratoire du DCSD à Toulouse.

Figure 12 : bras de positionnement initial

Figure 13 : sabot suspendu par les câbles
La motorisation fait appel à 9 moteurs sans balai
à très faible inertie
contrôlés par des variateurs à
découpage.
Une électronique de sécurité,
réalisée
par P. Carton surveille en permanence les paramètres
critiques
du démonstrateur
(vitesses, tensions, etc...). Ainsi, la rupture d'un câble
est
instantanément
détectée et provoque le freinage de l'ensemble de
la
motorisation.
L'intégration de l'armoire de puissance a
été réalisée par P.
Nicouleau
(Centre de Toulouse).
Elle a été conçue et
réalisée par P. Carton. Les mesures des 3
gyromètres,
des 9 accéléromètres, des 6
composantes balance et des 3 potentiomètres
associés aux gouvernes sont conditionnées,
traitées et numérisées
localement, à bord de la maquette, afin de limiter au mieux
les
perturbations. Les ordres destinés aux 3 servo-gouvernes
sont amplifiés
à bord. Tous ces signaux sont gérés,
multiplexés et transmis par un
câble coaxial qui assure l'alimentation de la maquette et le
transfert
bidirectionnel des données. L'électronique
embarquée (figure 14) se
présente sous la forme de 9 cartes reliées par un
bus. Elle est
complétée, à l'autre
extrémité du câble de service, par une
carte
d'interface (figure 15) qui gère la transmission des
données (selon la
norme série RS422 à 1.5 Mbauds) et la
transmission de la puissance.
Pour améliorer la précision du positionnement de
la maquette, ce qui
est important pour la commande mais aussi pour la précision
de la
restitution des trajectoires utilisées lors de
l'identification des
coefficients des modèles de mécanique de vol,
nous utilisons une
hybridation des informations en provenance des
accéléromètres, des
gyromètres, des longueurs de câbles et d'un
système de localisation
optique utilisant deux caméras visant des catadioptres
collés sur la
maquette (J.C. Barral).
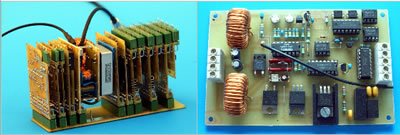
Figures 14 et 15 : électronique embarquée et
carte d'interface
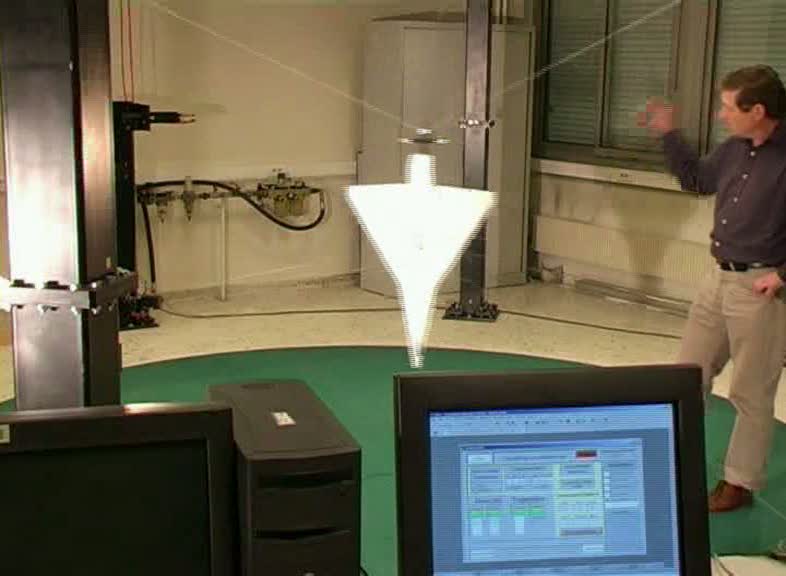
Les logiciels de conduite et d'exploitation ont été conçus par P. Carton, C. Lambert et M. Llibre. Leur mise en oeuvre se fait à l'aide de deux postes séparés pour la commande du système et pour la conduite et l'exploitation des essais (figure 16).

Figure 16 : les postes de commande et de conduite des essais.
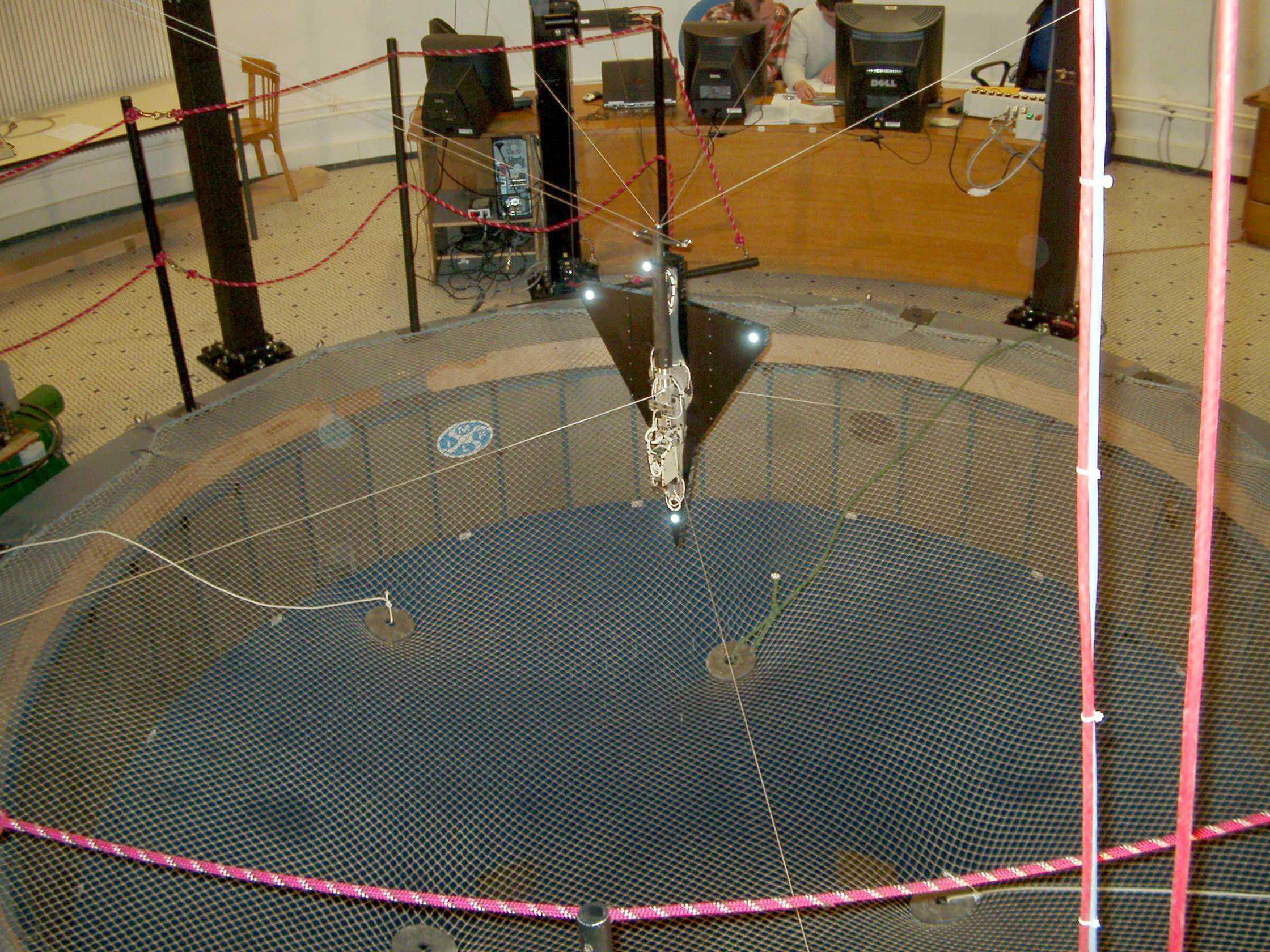
Les premiers essais de Sacso avec vent ont été effectués en avril 2005 dans la soufflerie SV4 du centre Onera de Lille (figure 17 et 18).


Figures 17 et 18 : Sacso installé dans SV4
Sacso offre de nouvelles dimensions dans le domaine des essais en soufflerie. De nouvelles techniques et de nouvelles méthodologies d'exploitation sont développées (P. Olivier et F. Bournonville). Elles ont été mises en oeuvre pour la maquette d'avion de combat (D. Farcy) début juillet 2005.
Initialement, la commande en mode position, maintient le sabot immobile dans une configuration fixe désirée. Au moment où l'opérateur saisit le sabot la commande est commuté en mode force sur les 6 degrés de liberté. Le torseur réalisé par les câbles, résultant de la commande coordonnée de leurs 9 tensions, compense exactement le poids du sabot. L'opérateur peut ainsi manipuler le sabot comme s'il était en impesanteur. Il ne ressent que son inertie. A la fin, il jette le sabot qui sera bloqué par les sécurités.
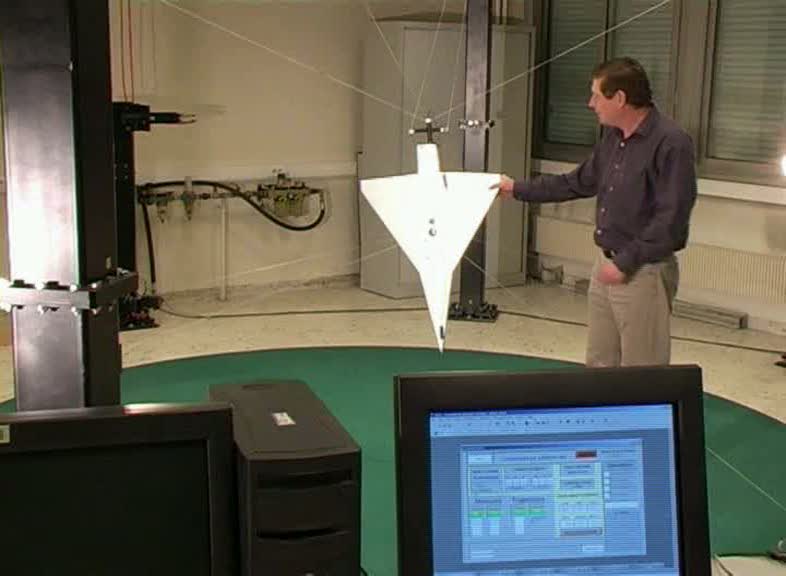
Impesanteur virtuelle
Initialement, la commande en mode position, maintient le sabot immobile dans une configuration fixe désirée. Au moment où l'opérateur saisit le sabot la commande est commuté en mode force sur les 3 degrés de liberté de rotation et est laissée en mode position sur les 3 degrés de liberté en translation. Ce mode de commande est dit hybride position/force. Le torseur réalisé par les câbles, résultant de la commande coordonnée de leurs 9 tensions a un moment dynamique résultant nul autour du centre du sabot. Celui-ci est donc libre en rotation autour de ce point. Par contre la force résultante des tensions s'oppose à tout mouvement de ce point et l'asservit à la position désirée.
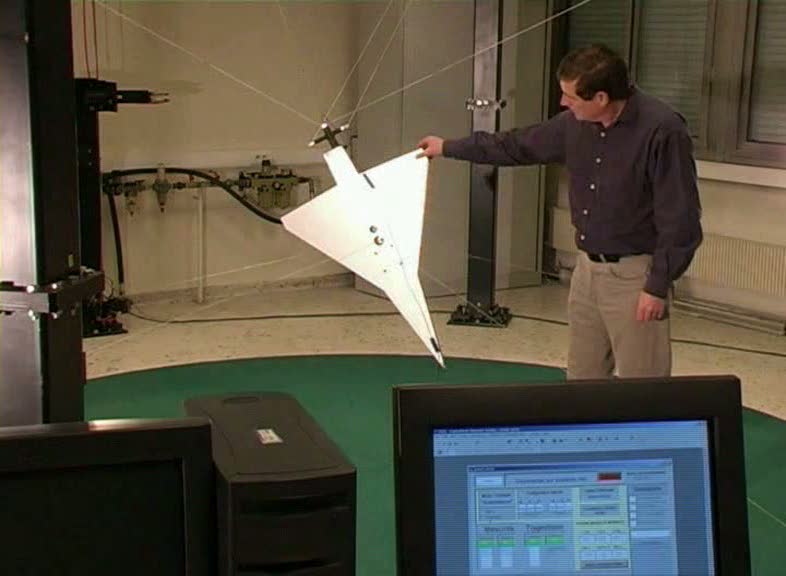
Rotule virtuelle
Dans cette démonstration le torseur réalisé par les câbles, résultant de la commande coordonnée de leurs 9 tensions, a un moment dynamique résultant qui s'oppose à toute rotation du sabot autour de son centre et l'asservit à une orientation désirée. Par contre :
Pantographe virtuel
Montage d'essais effectués le 6 Avril 2005 en la soufflerie verticale SV4 de l'ONERA, centre de Lille. Ce montage montre :

Essai en soufflerie - 6/4/2005
Essai en soufflerie - 7/2005
[1] P. Lafourcade, M. Llibre, C. Reboulet, « Le manipulateur à câbles SACSO », CIFA 2002, Conférence Internationale Francophone d'Automatique 2002, Nantes, 8-10 juillet 2002.
[2] Lafourcade P., Llibre M. and Reboulet C., « Design of a Parallel Wire-Driven Manipulator for Wind Tunnels », Proc. Of the Workshop on Fundamental Issue and Future Research Directions for Parallel Mechanisms and Manipulators, October 3-4, 2002, Quebec, Canada.
[3] P. Lafourcade, M. Llibre. « First Steps Toward a Sketch-Based Design Methodology for Wire-Drive Manipulators », 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. 20-24 Juillet 2003, Kobe, Japan.
[4] P. Lafourcade. « Étude de manipulateurs parallèles à câbles, conception d'une suspension active pour soufflerie ». Thèse de docteur ingénieur de l'ENSAE. 9/12/2004.
{kind=link}